

Da sempre l’uomo si ispira alla natura per ogni sua creazione e invenzione, dal sistema linfatico degli alberi ai complessi meccanismi del cervello umano. La biorobotica e la soft-robotics sono dei campi specifici della robotica che si occupano di studiare e osservare la natura, i sistemi biologici, i materiali e le forme per utilizzarli in campo tecnologico, soprattutto nella robotica. Si tratta di una nuova generazione di mini robot che si differenzia da come siamo abituati a vederli o immaginarli, duri e futuristici. Questi nuovi robot sono soffici, traggono ispirazione da piante e animali.
Ci sono robot che si ispirano a polpi, meduse o pesci, ma anche robot che traggono ispirazione dalle piante, come quelle rampicanti, ad esempio.
Il mini robot rampicante
Nell’IIT (Istituto Italiano di Tecnologia) è nato il primo robot che trae ispirazione e si comporta esattamente come una pianta rampicante, basandosi su un modello matematico. Il team di ricerca che ha realizzato il soft robot è coordinato da Barbara Mazzolai, con l’aiuto del tecnologo dei materiali Edoardo Sinibaldi e dell’ingegnere aerospaziale Indrek Must. Il progetto è stato presentato poi alla rivista Nature Communication.
Il robot è in grado di muoversi e cambiare forma, arrampicandosi come una pianta attraverso l’osmosi, ovvero sfruttando per muoversi il trasporto dell’acqua al suo interno.

Il corpo del viticcio artificiale è stato realizzato con un tubo PET, all’interno del quale scorre un liquido con ioni. Grazie ad una batteria il liquido all’interno del tubo dà vita a un processo d’osmosi che permette al robot di muoversi e comportarsi esattamente come farebbe una pianta rampicante.
È la prima volta che si riesce a portare l’osmosi nella robotica e l’invenzione è sensazionale perché ci dimostra che è possibile creare mini robot che si adattano facilmente all’ambiente circostante, evitando gli ostacoli e senza recare danni agli oggetti o agli esseri viventi.
Nel concreto il robot rampicante potrà essere utilizzato nel campo delle tecnologie indossabili, ma anche nella realizzazione di braccia robotiche incredibilmente flessibili.
Il robot polpo
Rimaniamo ancora in Italia, dove, l’Istituto di Biorobotica della Scuola Superiore Sant’Anna di Pisa, ha realizzato un robot soffice ispirato al polpo.
Il progetto parte dallo studio della straordinaria capacità senso-motoria del polpo, per arrivare a realizzare un robot completamente soffice e dinamico.

“La sfida è quella di imitare i principi grazie ai quali un muscolo si contrae e si irrigidisce, cioè i meccanismi basilari per funzioni come la locomozione e la manipolazione d’oggetti”.
Un mini robot polpo sarebbe utilissimo in campo medico. Sarebbe, infatti, in grado di inserirsi all’interno del corpo umano, aggirare agevolmente organi e parti delicate, arrivando fino al punto dove è necessario intervenire.
Il mini robot medusa
L’Italia non è l’unica che sta studiando i complessi meccanismi di questi affascinanti animali marini per ricreali in robotica. Accanto al robot polpo, infatti, troviamo il robot medusa, un minuscolo robot di appena tre millimetri. È stato creato al Max Planck Institute, in Germania, e si comanda attraverso un campo magnetico, senza bisogno di fili.

Dal corpo centrale, di appena tre millimetri, si estendono otto minuscoli tentacoli, i quali sono in grado di contarsi ed estendersi, nuotare, trasportare oggetti, scavare e mescolare i liquidi circostanti.
È la prima volta che un robot così piccolo è in grado di manipolare gli oggetti.
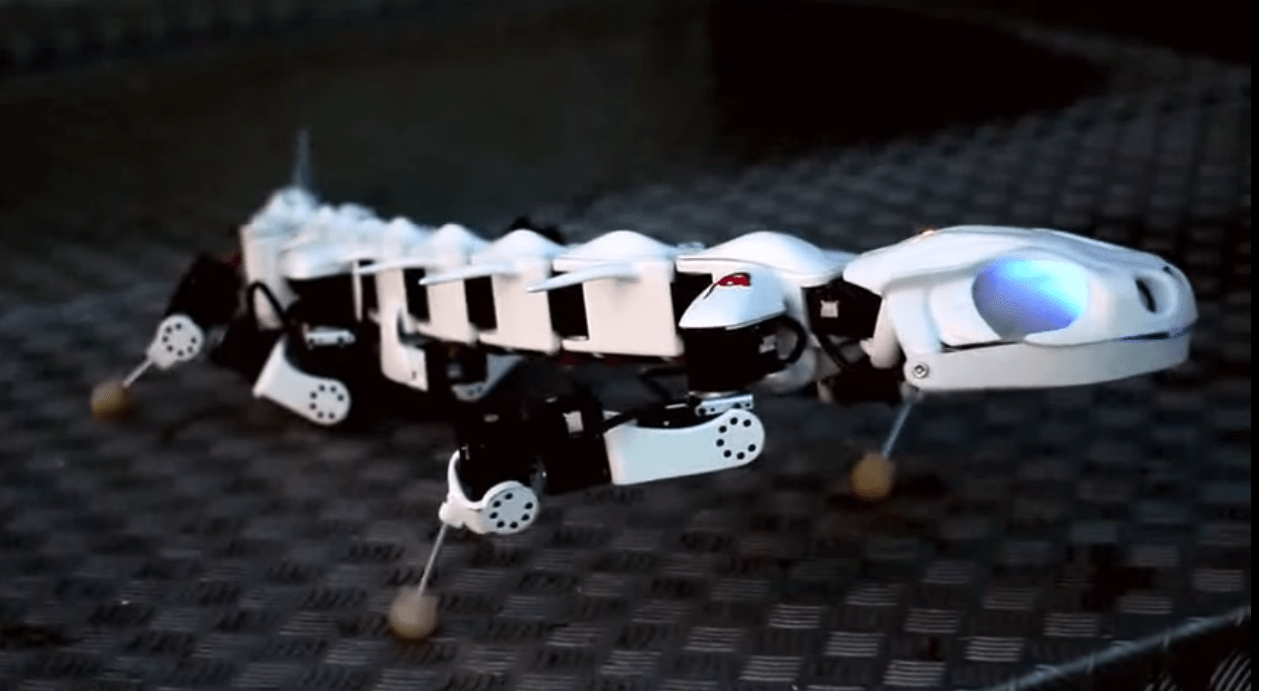
Il robot salamandra
Al Politecnico di Losanna, in America, si studiano i robot anfibi. Da qui, infatti, sono usciti numerosi robot ispirati al mondo animale, dal serpente anfibio al pesce robotico fino a Pleurobot, la salamandra.
Nel corso dello studio sono stati attentamente osservati i movimenti dell’animale, sia mentre cammina che mentre nuota, individuando ben 64 punti sul suo scheletro. 64 punti che sono stati, ovviamente, riprodotti anche nell’esoscheletro del robot, consentendogli di muoversi agilmente esattamente come una salamandra in carne ed ossa.
{kind=link}
Ma questi sono, ovviamente, solo pochissimi degli esempi di robotica ispirata alla natura che si possono fare. Sono stati realizzati robot ispirati praticamente a qualsiasi animale, dal canguro alle farfalle, dal gabbiano alle api, per finire con una moltitudine di minuscoli robot insetto. Anche dal mondo vegetale si trae continuamente ispirazione. Il rampicante, infatti, non è l’unico esempio di come la robotica tragga ispirazione dalle piante. Già in precedenza si era provato a riprodurre radici e fronde.
Alla fine l’uomo non ha davvero inventato nulla, ha solamente copiato ciò che già esisteva in natura.
This post is also available in: